- 歡迎訪問牧雅閥門有限公司網站!
 耐磨陶瓷閥門、耐磨鑄石閥門一站式制造商高新技術企業 國家特種設備制造許可證(TS)企業全國免費熱線0577-67336222
耐磨陶瓷閥門、耐磨鑄石閥門一站式制造商高新技術企業 國家特種設備制造許可證(TS)企業全國免費熱線0577-67336222
1 系統硬件設計
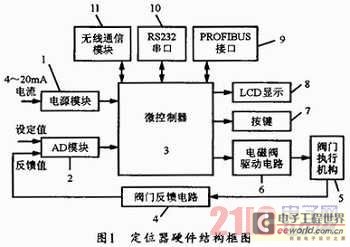
本設計中運用先進的微控制器芯片及外圍擴展器件,設計具有良好性能的智能閥門定位器,對閥門的工作進行定位、監控,實現閥門的執行機構的數字化、智能化的產品要求。最終研制的產品要做到體積小、精度高、功能齊全、操作方便。本文設計的定位器的原理結構框圖如圖1所示。
1.1 微控制器及其外圍電路設計
微控制器采用的是XC164CM單片機,它是德國英飛凌公司16位微控制器系列的第四代產品,具有運算速度快、穩定性好、電磁兼容性強的特點,適用于實時性、可靠性要求高、電磁環境復雜的應用場合。C166 V2內核采用5級指令流水線機制(外加2級預取指令流水線)。該機制使得XC164CM執行絕大多數指令平均只需一個CPU時鐘周期,大大提高了微控制器的指令執行速度。C166 V2內核中的高性能16位CPU內部集成了一個乘法累加單元(MAC)。MAC單元擁有一套獨立指令集,使XC164CM具有16位定點DSP的部分功能,能夠在較短的時間內完成較為復雜的數字算法,例如:MAC支持單時鐘周期完成乘加運算(16位x16位+32位),并能自動地以飽和的方式來防止計算結果的溢出。XC164CM在C166 V2內核的基礎上擴展了豐富的片上外圍子系統,能很好的滿足汽車傳動應用場合對各種I/O接口的需要。
1.2 電源電路
在系統電路中,邏輯電路需要5V直流電壓,傳感器電路、A/D、D/A、等需要5V參考基準電壓,運算放大器需要±12V電壓,微控制器還需要一個2.5V的內核電壓,而電磁閥則需要24V電壓。由于本定位器采用的是二線制低功耗設計,且定位器輸入的只是一個電流信號,因此,需要將4-20mA的電流變換為所需要的電壓。本實用新型中,通過電流輸入轉化的24V電壓經過濾波電路后,提供給兩個DC/DC模塊,分別將電壓轉換為+5V和正負12V。+5V電壓經過LM1117變換為+2.5V,用于微控制器的內核供電。正負12V用于給運放供電。其中正12V還用于產生+5V參考電壓提供給A/D轉換電路。
1.3 信號調理及ADC電路
圖2為4~20mA電流信號調理電路。4~20mA信號流過120歐姆的精密采樣電阻,轉換成電壓信號。再通過儀用放大器LT1920,輸出給ADC芯片MCP3204。二極管D1可以防止電流反接。D7是一個TVS管,起著過壓保護的作用。扼流圈用于抑制共模干擾。R12,R21,C10,C11,C12構成一個低通濾波網絡,用于濾除高頻干擾。可以看出,電路中既有共模濾波(R12/C10,R21/C12),又有差模濾波(R12+R21,C11)。濾波器的總帶寬至少應為輸入信號帶寬的100倍。元件應對稱安裝在具有大面積接地面的印制電路板上,并且位置十分靠近儀用放大器的輸入端,以使濾波器達到最佳性能。共模濾波的時間常數可以按如下計算:TCM=R12*C10=R21*C12。差模濾波的時間常數可以按如下公式計算:TDIFF=(R12+R21)*C11。
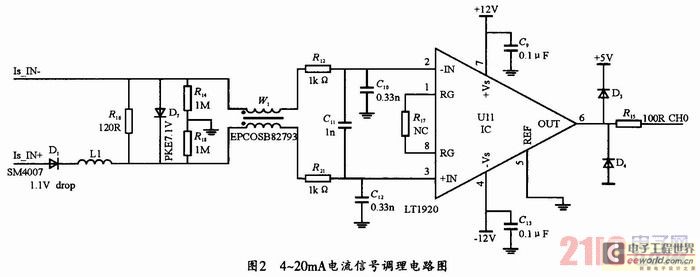
LT1920是LINEAR公司的一款高精度儀用放大器。儀用放大器是一種具有差分輸入和其輸出相對于參考端為單端輸出的閉環增益單元。輸入阻抗呈現為對稱阻抗且具有較大的數值。與由接在反相輸入端和輸出端之間的外部電阻決定的閉環增益運算放大器不同,儀用放大器使用一個其信號和輸入端隔離的內部反饋電阻網絡。其增益可由外部電阻設定,典型值為1~10000。LT1920是一款低功耗、高精度的儀用放大器。
閥門的實際開度反饋信號來自于傳感器接口電路。傳感器采用的是高性能的導電塑料精密電位器,是具有較高分辨能力的、高可靠性的經濟類型產品。傳感器輸入5V參考電壓,輸出反饋電壓信號。傳感器相當于一個電位器,通過電阻進行分壓,所以反饋電壓信號和閥門開度是線性的對應關系。
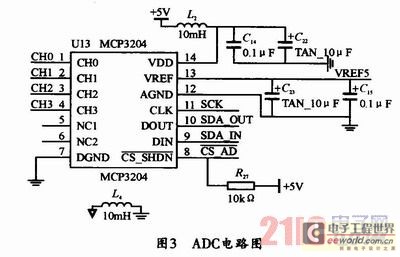
圖3為ADC電路,其中AD轉換芯片采用Microchip公司的12位精密ADC芯片MCP3204。MCP3204通過SSC串口和XC164CM通信。MCP3204共有4個模擬量轉換通道,分別用來轉換閥位反饋值、電壓設定值、電流設定值等模擬量。
1.4 DAC電路
在定位器的工作中,對閥門的實際開度除了要求進行LCD顯示外,有時還需要將閥門實際開度的模擬電流量送回到控制中心。位置變送器采用的是高性能導電塑料電位器,它送來的閥位反饋信號經過微處理器進行處理后,需要再經過D/A轉換接口,變成電壓信號,然后通過電壓/電流轉換電路變成電流信號輸出,送往遠程控制端。本設計中,新型的DAC芯片通過SSC串口和微控制器連接,用于將單片機給的數字信號轉化為模擬電壓信號,然后電壓信號再轉化為4~20mA電流信號。
2 軟件設計
定位器利用閉環控制原理,將從調節器來的調節信號或直接的控制信號與從執行器來的閥門位置反饋信號相比較,根據比較后的偏差使調節閥執行機構動作,從而使閥芯準確定位,達到定位的目的。其離散PID算法的一般形式是:
Kp,KI,KD分別表示比例系數、積分系數、微分系數。新型采用模糊自適應整定PID算法原理如圖4所示。
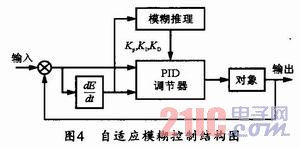
自適應模糊PID控制器以誤差E和誤差變化EC作為輸入,可以滿足不同時刻的E和EC對PID參數自整定的要求。
PID參數的整定必須考慮到在不同時刻三個參數的作用,總結工程設計人員的技術知識和實際的操作經驗,就能建立針對Kp,KI,KD三個參數分別整定的模糊控制表,表1所列為Kp的模糊規則表。

模糊控制規則表建立好后,可根據如下方法進行Kp,KI,KD的自適應校正。將系統誤差E和誤差變化率EC變化范圍定義為模糊集上的論域。

其模糊子集為:

設E,EC和Kp,KI,KD隸屬度函數為三角形函數,因此可以得出各模糊子集的隸屬度,根據各模糊子集的隸屬度賦值表和各參數的模糊控制規則表,就可以得到各個模糊規則下的模糊關系。進而求得Kp,KI,KD的模糊子集。
根據實際情況,采用最大隸屬度法進行解模糊判決。定義Kp,KI,KD參數的調整算式如下:
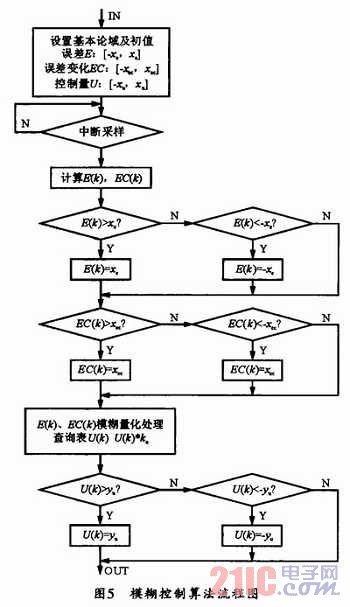
在線運行過程中,控制系統通過對模糊邏輯規則的結果處理,查表和運算,完成對PID參數的自校正,流程圖如圖5所示。其中:E:誤差,EC:誤差變化,U:控制量,kU:比例因子。
3 結束語
本文主要討論了模糊控制算法在閥門定位器中的運用以及所用的微控制器和所涉及的外圍電路設計,在工程實踐中表明這些方法都是可行的。但是由于工業現場環境的干擾,控制精度有待進一步的提高,而且算法還是可以進一步優化,在后續的研究中,可以嘗試用神經網絡等控制方法進行更深入的研究。